在动态和开放的真实世界中,如何让智能机器人像人类一样持续掌握新技能,而又不遗忘旧有知识,是通用人工智能和机器人学领域面临的一项核心技术瓶颈。传统学习范式下的机器人在学习新任务时,新知识往往会干扰甚至完全覆盖已习得的旧技能,这一“灾难性遗忘”现象严重限制了机器人在复杂场景中长期自主服务的潜力。
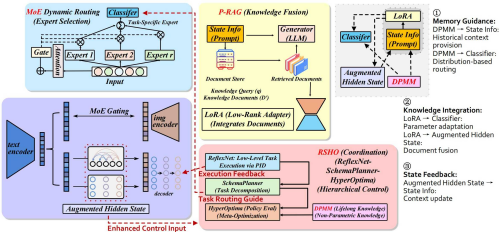
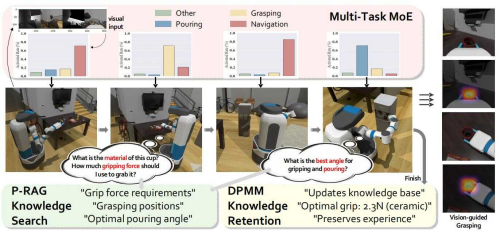
近日,中国科学院重庆绿色智能技术研究院大数据与无人系统研究中心在自然语言处理(NLP)领域顶级学术会议ACL 2025(Annual Meeting of the Association for Computational Linguistics,国际计算语言学年会,CCF A类会议)上发表了题为《DRAE: Dynamic Retrieval-Augmented Expert Networks for Lifelong Learning and Task Adaptation in Robotics》的论文,提出了一种名为DRAE(动态检索增强专家网络)的机器人终身学习新框架。针对现有方法面临的核心技术瓶颈——静态网络结构难以适应动态任务变化、固定检索系统无法处理不断演进的知识需求,研究团队受人脑神经可塑性机制启发,构建了四重协同的技术架构:动态专家混合模型(MoE)负责智能任务路由分配,指导参数化检索增强生成(P-RAG)技术从外部知识库精准获取相关信息,这些增强信息与任务状态一起输入ReflexNet-SchemaPlanner-HyperOptima三层认知控制架构进行感知-规划-执行的完整决策处理,而狄利克雷过程混合模型(DPMM)将整个处理过程中的关键知识以非参数贝叶斯方式动态存储,形成任务级知识积累的闭环反馈。该方法的关键突破在于通过统一数学框架将四个核心组件深度融合,实现了知识检索与参数更新的有效解耦,从根本上解决了新技能学习过程中对旧技能参数的破坏性覆盖问题,为机器人系统在复杂环境中的持续自主学习提供了可行的技术路径。
实验结果表明,DRAE框架在多项关键指标上达到国际先进水平。在MimicGen多任务机器人操作基准测试中,平均任务成功率达到78%,显著超越传统MoE基线模型的73%;在NAVSIM自动驾驶导航仿真基准中,综合评估分数达到82.5分,在路径完成率(98.4%)和碰撞避免率(96.2%)两项关键指标上均为最佳表现;在LLFF和NeRF Synthetic 3D视觉合成数据集上,峰值信噪比分别达到26.07dB和27.47dB,超越当前最先进方法;在物理人形机器人的12项复杂动作指令测试中,成功率达到90-100%,验证了框架在真实环境中的有效性。
该研究成果为提升机器人在复杂、非结构化环境中的持续学习与自适应能力提供了新的技术途径,在有效缓解灾难性遗忘的同时保持了计算效率,为开发能够长期自主学习的机器人系统提供了有价值的参考。
上述论文作者包括中国科学院重庆绿色智能技术研究院硕士一年级研究生龙垭宇、陈可为,通讯作者为尚明生研究员,相关研究得到了国家自然科学基金等项目的支持。